1. INTRODUÇÃO
A automação e controle de sistemas é uma área que tem crescido consideravelmente com o uso de novas tecnologias computacionais existentes no mercado. Neste sentido, Sistemas Robóticos vêm sendo criados para os mais diversos tipos de atividades, das mais simples, como o controle de acendimento de uma lâmpada, às mais complexas como a reprodução dos movimentos do corpo humano por robôs humanoides.
Conhecer as tecnologias usadas nestes sistemas, torna-se então uma grande tarefa a ser desenvolvida cada vez mais cedo por estudantes de áreas técnicas para que os mesmos possam propor soluções tecnológicas cada vez melhores para as atividades que os permeiam.
Este trabalho visa assim, montar um protótipo de uma plataforma robótica terrestre, autônoma, com código de programação em C embarcado a ser usada com fins didáticos para que os alunos dos Campus Cachoeiro de Itapemirim possam desenvolver atividades relacionadas à Robótica logo no início dos seus cursos.
2. OBJETIVO
O objetivo geral é a implementação de um sistema de controle de um veículo terrestre autônomo, para ser utilizado na plataforma ARDUÍNO UNO.
Como objetivos específicos, citam-se:
3. METODOLOGIA
Partindo-se da intenção de montagem de um protótipo de um veículo terrestre autônomo, foram realizadas pesquisas de campo a respeito dos estudos existentes na área.
Definiu-se também que a construção das partes mecânicas seriam confeccionadas nos próprios laboratórios do Campus, de acordo com a necessidade e adequações que se fizessem necessárias.
Já com relação ao circuito elétrico, devido aos trabalhos realizados anteriormente no Campus e a disponibilidade de recursos existentes até o momento, optou-se pelo uso do Sistema Microprocessado ARDUÍNO UNO para ser embarcado no protótipo, usando programação em linguagem C/C++.
Por fim, com relação à autonomia deste veículo, foram usados dois sensores de ultrassom para medir distancias de objetos.
Materiais:
4. RESULTADOS
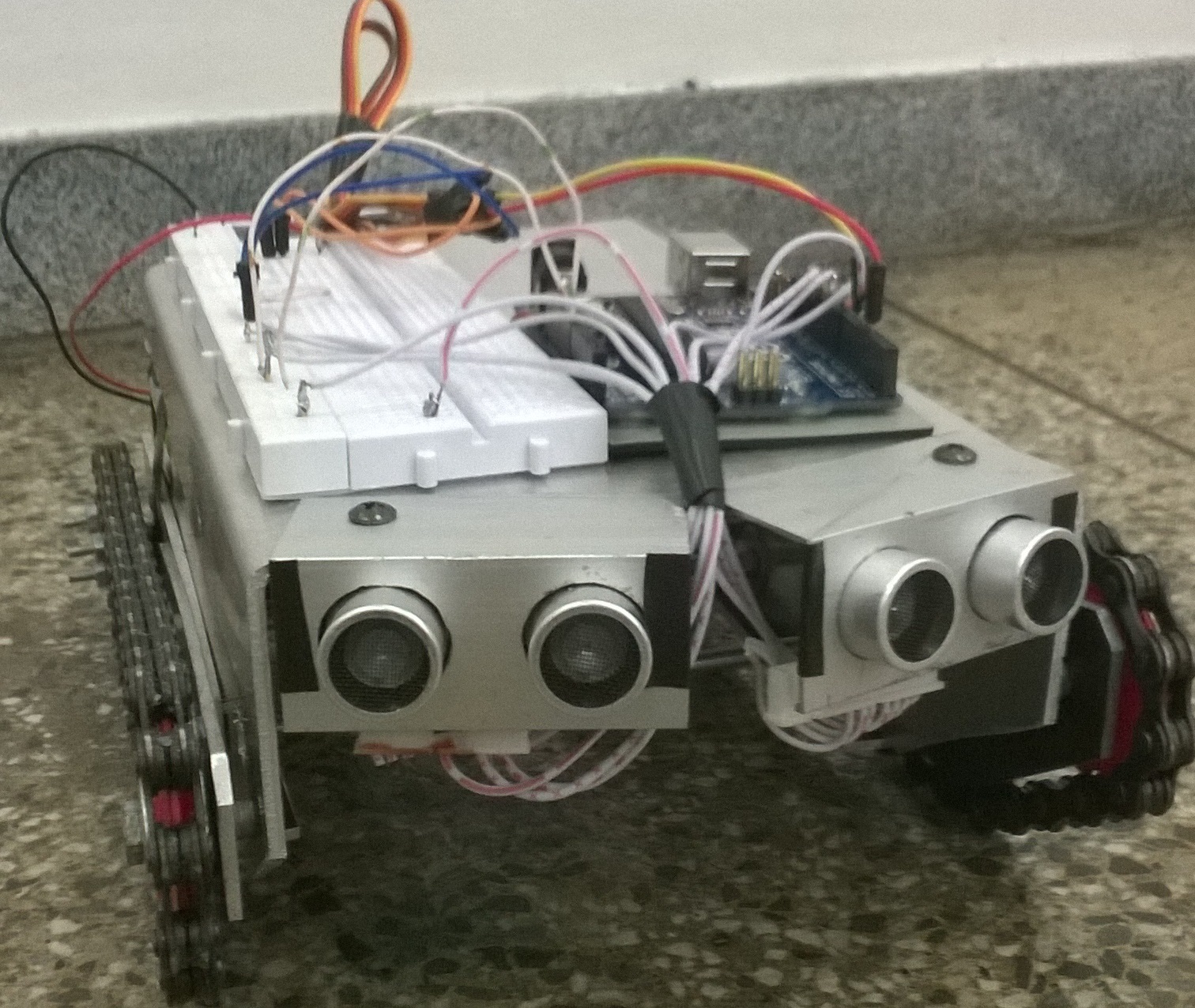
protótipo do robô já implementado para testes

protótipo do robô já implementado para testes
5. CONCLUSÃO
Com a realização deste trabalho, pôde-se perceber a compreensão de como montar um Sistema Automatizado de maneira geral.
Realça-se aqui que o sistema implementado trata-se de uma Plataforma Robótica robusta mecanicamente que utiliza uma ferramenta de controle de ponta.
A linguagem gráfica de programação se mostrou eficiente.
Este projeto foi orientado pelos professores:
Júlio césar Madureira Silva e Sayd Farage David
e foi realizado por mim no Instituto Federal do Espirito Santo Campus Cachoeiro de Itapemirim.